电子皮肤类似于人体皮肤,它可以感知外界刺激获取环境信息,并将其转化为电信号,这项技术在软体机器人、假肢设计和可穿戴设备等领域备受关注。然而,目前仍存在一些挑战,如传感灵敏度、功能单一、稳定性和环境适用性等方面的限制,阻碍了其广泛应用。
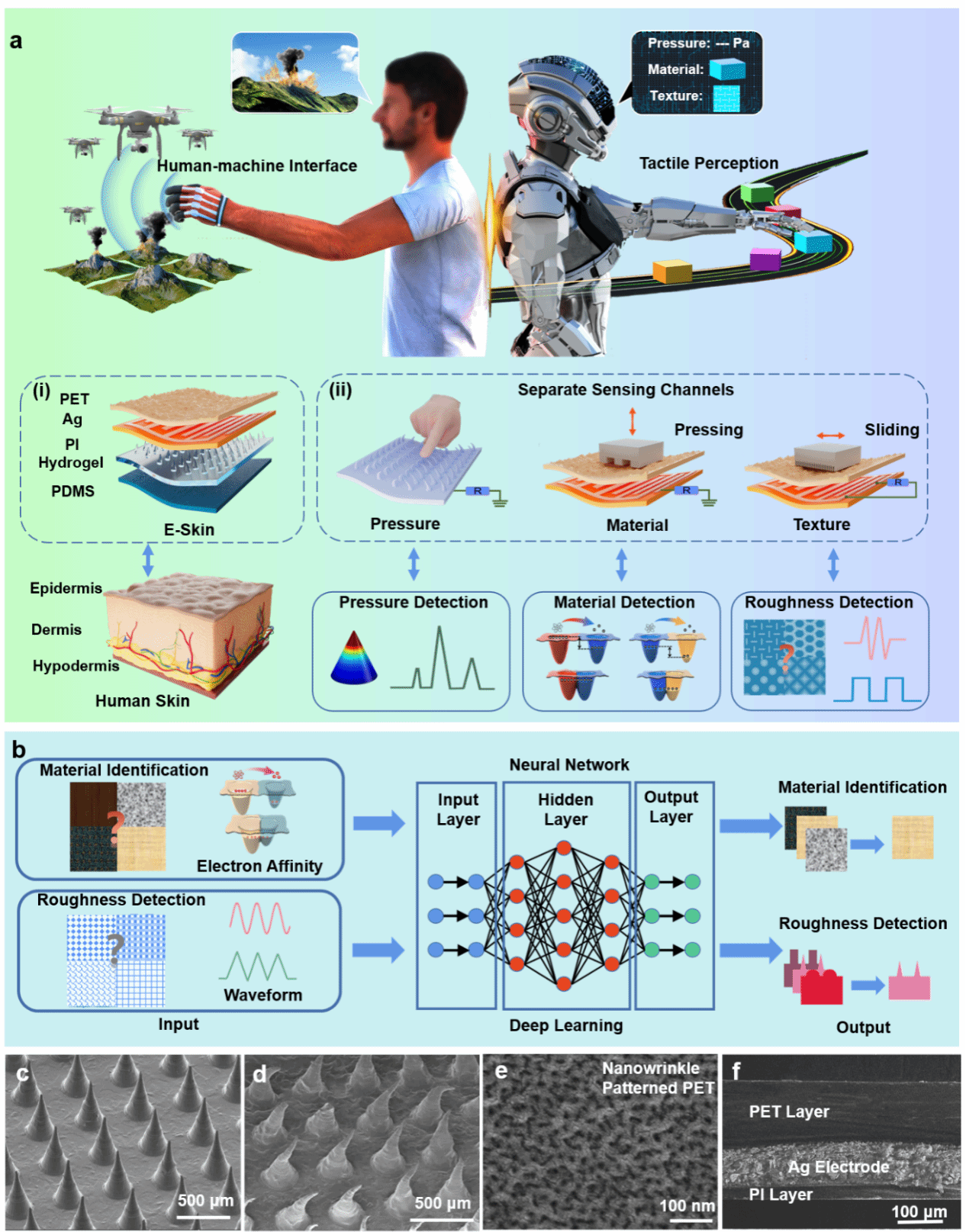
图1:图案化水凝胶基仿生电子皮肤(BHES)整体结构设计
必威陶凯课题组提出了一种基于图案化水凝胶材料的多功能仿生电子皮肤(BHES),如图1所示。为模仿表皮层表面并更好地利用摩擦起电机制,引入了纳米褶皱图案化PET。同时采用微针图案化水凝胶作为摩擦层和导电电极,以提高器件的灵敏度。该电子皮肤具备高灵敏度压力传感、高准确率材料种类以及表面粗糙度识别等多种功能。结合信号采集/处理电路,可以通过该电子皮肤对人的手势进行检测,并用于进行无人机的三自由度运动操控以及无人机群的运动控制(图1)。
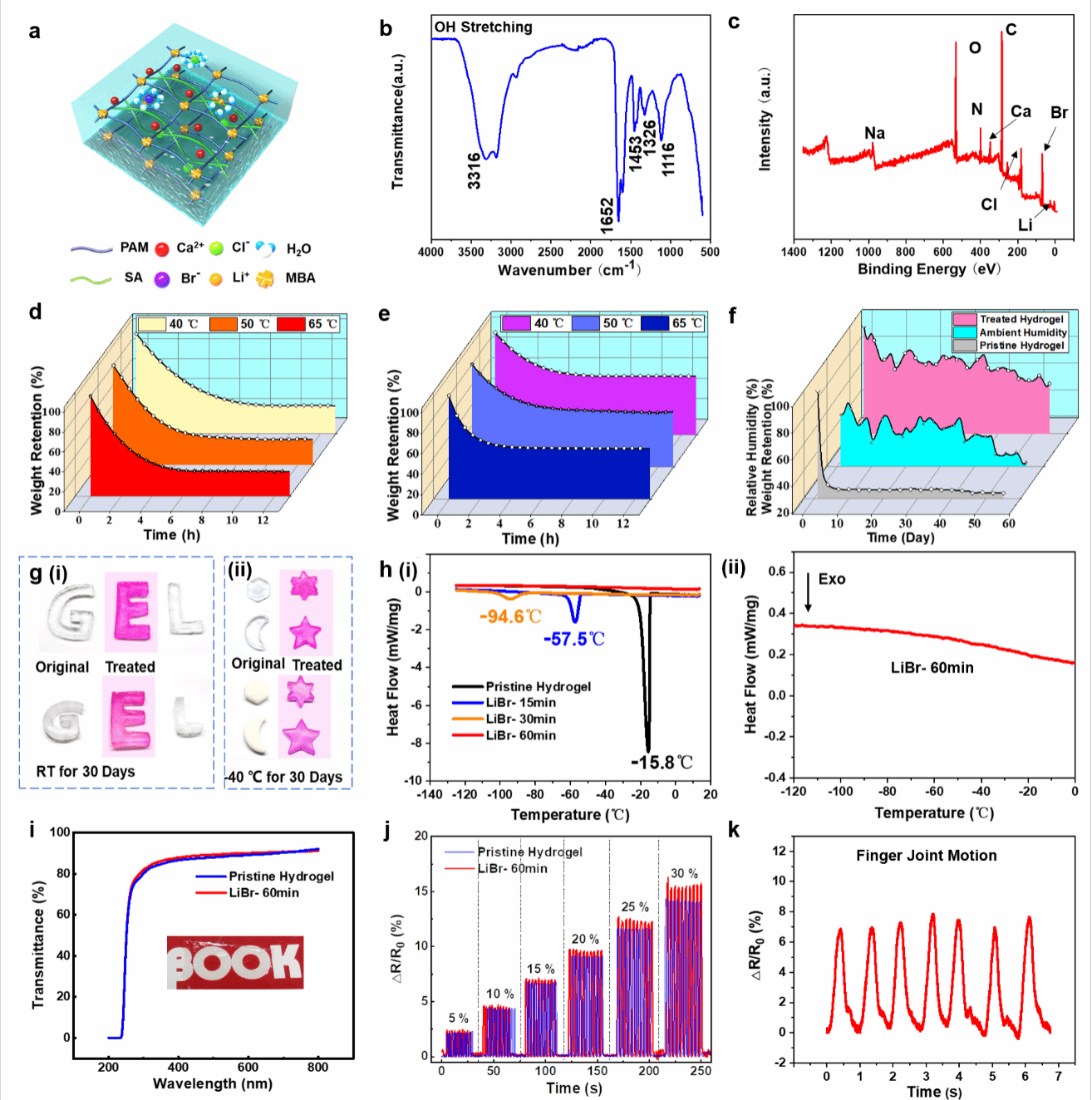
图2:双网络结构离子水凝胶的性能表征
在传统双网络离子导电水凝胶中引入LiBr溶液,利用离子水合作用极大改善了其抗干燥以及耐低温性能,拓宽了其适用温度范围。所设计的水凝胶显示出卓越的抗干燥和耐低温能力,此外,它还具备较高的透明度、电学稳定性以及作为人体运动传感器等多种优异性能(图2)。
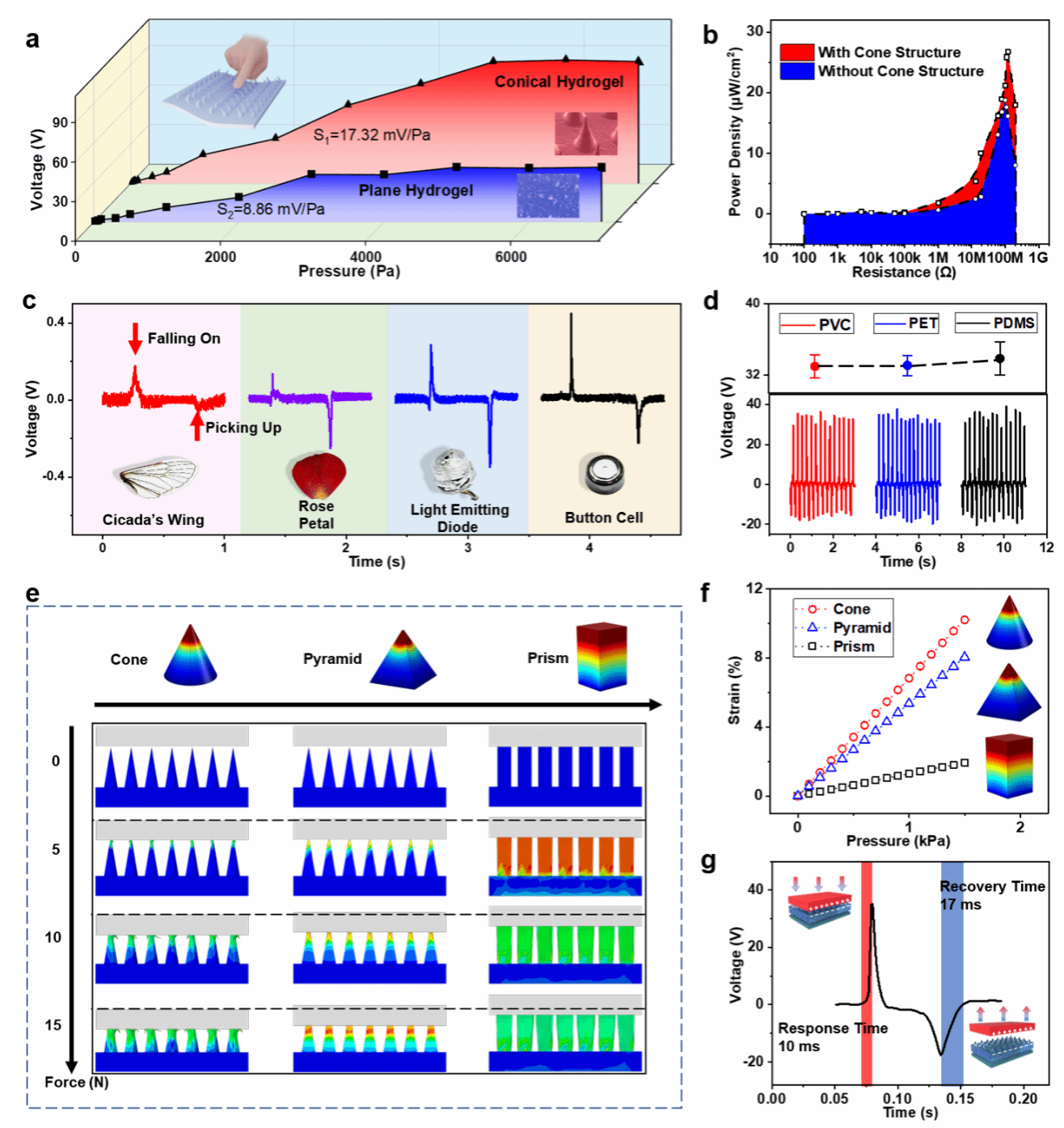
图3:BHES的压力传感应用展示
在该项研究中,首先通过仿真与计算优化水凝胶表面的微结构设计,并通过微纳加工工艺制备了表面带有微针结构的水凝胶电极材料,使得器件的压力传感灵敏度由8.86 mV/Pa提高到了17.32 mV/Pa。此外,设计的电子皮肤还具备微小物体检测和快速响应(10 ms)/恢复(17 ms)的特性(图3)。
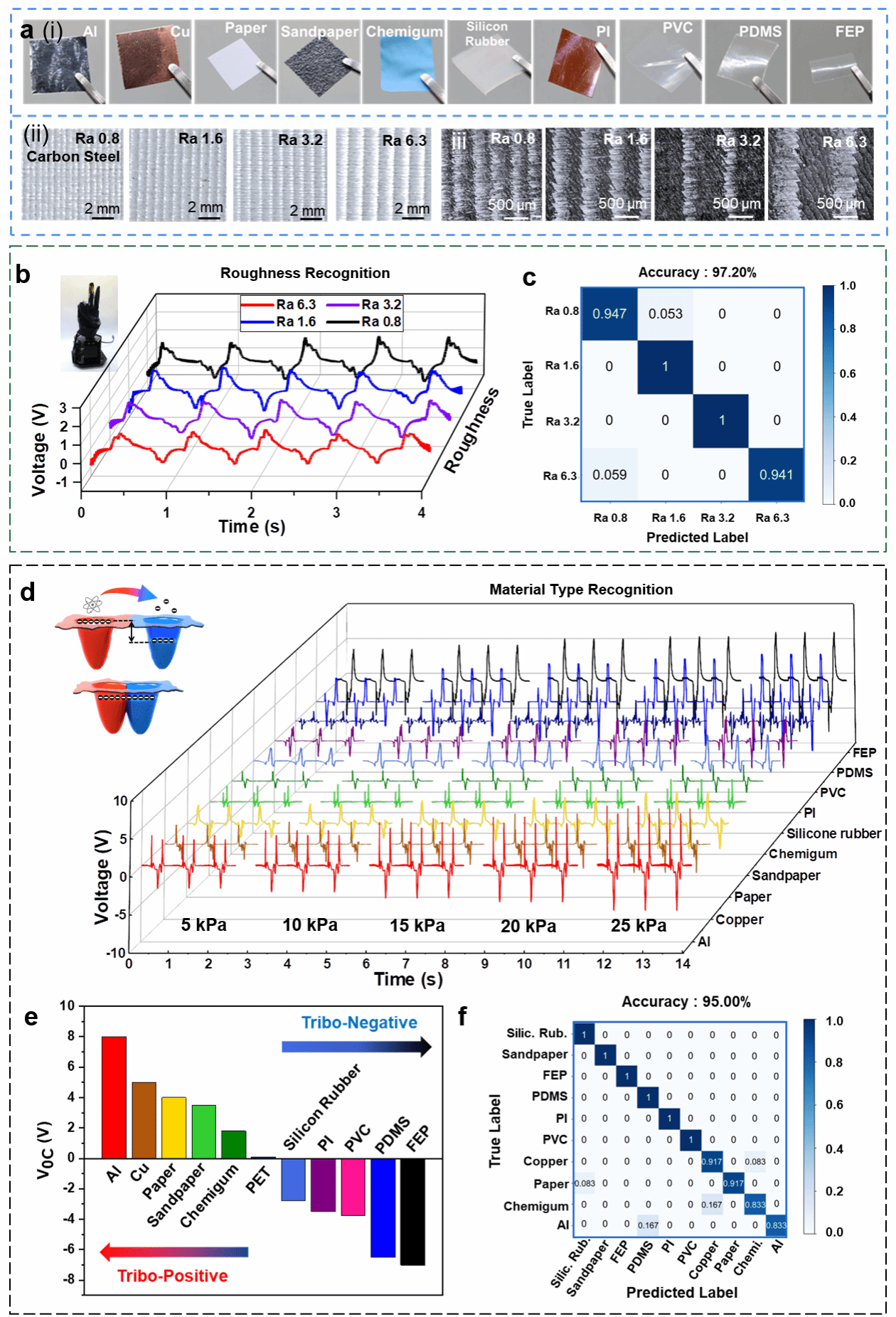
图4:BHES的材料识别应用展示
基于不同材料在接触起电过程中的得失电子能力差异这一机理,设计的电子皮肤可以准确地识别材料种类,同时借助粘滑现象实现对材料纹理/粗糙度的识别。利用深度学习技术,实现了对10种常用工程材料的准确识别(识别准确率为95.00%)以及对具有4种不同粗糙度的碳钢材料的准确识别(识别准确率为97.20%)(图4)。

图5:基于BHES的无人机控制系统展示
研究者基于BEHS,结合信号采集/处理电路,设计了一套可穿戴式无人机控制系统,实现了利用人体手势对四旋翼无人机的三自由度运动控制以及对无人机群的控制演示,有望在环境保护、森林防火救灾等场景中进行使用(图5)。该研究工作为智能机器人在数字孪生和元宇宙领域的应用提供了新的思路,并展示出在自供能人机交互界面系统的应用潜力。
上述成果以题名“Deep-Learning Enabled Active Biomimetic Multifunctional Hydrogel Electronic Skin”发表在微纳米科技领域国际权威期刊《ACS Nano》上。必威苑伟政教授和北京大学张海霞教授为共同通讯作者,学生第一作者是硕士生于家豪,必威本科生张继元、鲍奥成、胡皓文、王耀正、杜欣悦、万锦琳、张佳成,航空学院本科生赵世泽、杜晓帆等在论文研究和写作方面做出了贡献。
论文信息:
K. Tao, J. Yu, J. Zhang, A. Bao, H. Hu, T. Ye, Q. Ding, Y. Wang, H. Lin, J. Wu, H. Chang, H. Zhang, W. Yuan. Deep-Learning Enabled Active Biomimetic Multifunctional Hydrogel Electronic Skin[J]. ACS Nano, 2023, 17(16): 16160–16173.
文章链接:
https://doi.org/10.1021/acsnano.3c05253
图文:于家豪
审核:罗明